Meeting Time
Tuesday 5PM
Project description
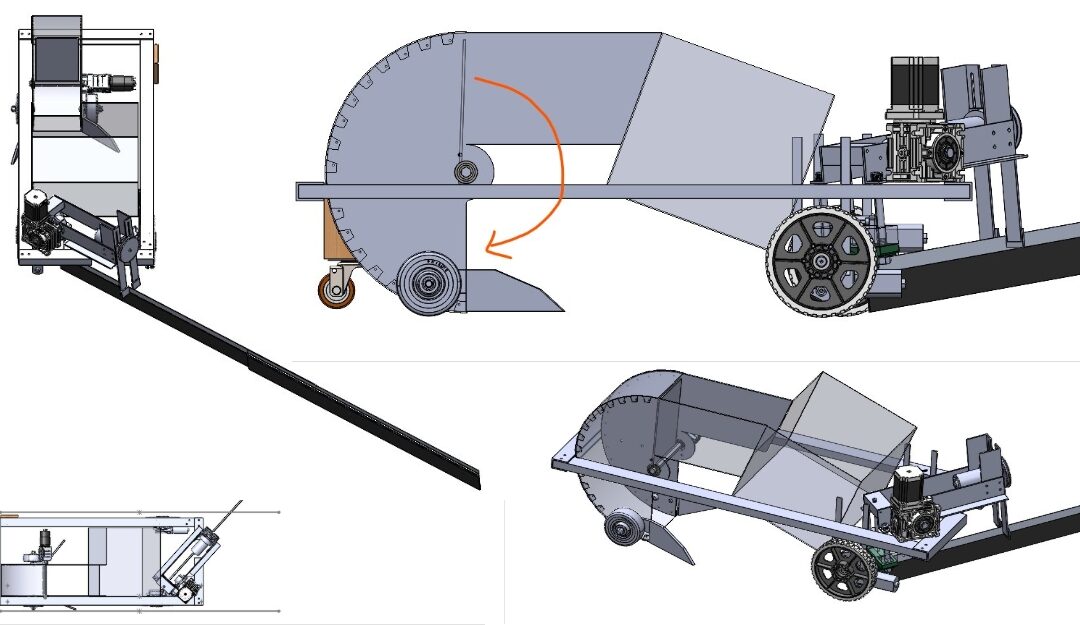
Throughout each year, trash accumulates alongside gutters in roads creating clutter and increasing the risk of debris spreading onto roads. This project will cooperate with community partner Jared Schoepf to create a prototype autonomous robotic cleaner for bike lanes and sidewalks. At the end of the semester the team hopes to develop a robot that acquires trash, gravel, and other debris that resides on the bike lanes on University Drive. In the future, the team hopes to have a robot that autonomously docks to charge and empty its storage without user input.